hi I m Kishore and I m planning to do my first college project with my friends….my projects is about 2d printers
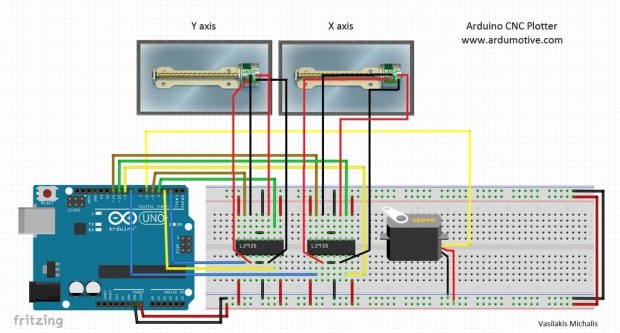
For the circuit you will need:
Part list for beginners:
- Arduino uno
- Breadboard
- 2x L293D ICs Motor driver
- Mini Servo Motor
- 2x DVD/CD Drives
Part list for ‘pro’ :
- ATmega328p (with Arduino Bootloader)*
- 28 pin DIP IC Socket
- 16MHz Crystal Oscillator
- 2x 22pF and 1x 100nF capacitors
- 10K resistor
- USB to Serial adapter**
- 2x L293D ICs
- Mini Servo Motor
- 2x DVD/CD Drives
- Prototyping PCB Circuit Board Stripboard
- 4x 2pins Screw Terminal Connector (or 2x 4 pins Screw Terminal Connector)***
*You will also need an Arduino UNO board to program the ATmega328 micro controller.
**USB to Serial adapter will allow the circuit to communicate with the computer through the USB cable, just like Arduino uno does.
***Why to use screw terminal connectors? Because you don’t want to solder and desolder cables from stepper motors until you find the correct working combination!
For the mounting base:
- One piece of plexiglass 20×16 cm (thickness 5mm) (for X axis)
- Two pieces of plexiglass 14×4 cm (thickness 5mm) (for Y axis)
- A few nut screws, nuts and shims (~20)
- A few spacers
- Four supporting angles (preferably plastic)
Instead of plexiglass you can also use wood, metal or parts from dissasembly cd/dvd drives
Tools:
- Screwdriver
- Soldering iron
- Solder
- Drill
- Cutting tool (e.g. Dremel) (Optional for cutting plastic/plexiglass parts)
- Glue
click thislink CNC plotter to see the video of it
CODE FOR CNC PLOTTER:
#include <Stepper.h>
#define LINE_BUFFER_LENGTH 512
// Should be right for DVD steppers, but is not too important here
const int stepsPerRevolution = 20;
// create servo object to control a servo
// Initialize steppers for X- and Y-axis using this Arduino pins for the L293D H-bridge
Stepper myStepperY(stepsPerRevolution, 2,3,4,5);
Stepper myStepperX(stepsPerRevolution, 6,7,8,9);
Stepper myStepperZ(stepsPerRevolution, 10,11,12,13);
/* Structures, global variables */
struct point {
float x;
float y;
float z;
};
// Current position of plothead
struct point actuatorPos;
// Drawing settings, should be OK
float StepInc = 1;
int StepDelay = 0;
int LineDelay = 50;
int penDelay = 50;
// Motor steps to go 1 millimeter.
// Use test sketch to go 100 steps. Measure the length of line.
// Calculate steps per mm. Enter here.
float StepsPerMillimeterX = 6;
float StepsPerMillimeterY = 6;
// Drawing robot limits, in mm
// OK to start with. Could go up to 50 mm if calibrated well.
float Xmin = 0;
float Xmax = 40;
float Ymin = 0;
float Ymax = 40;
float Zmin = 0;
float Zmax = 30;
float Xpos = Xmin;
float Ypos = Ymin;
float Zpos = Zmax;
// Set to true to get debug output.
boolean verbose = false;
// Needs to interpret
// G1 for moving
// G4 P300 (wait 150ms)
// M300 S30 (pen down)
// M300 S50 (pen up)
// Discard anything with a (
// Discard any other command!
/**********************
* void setup() – Initialisations
***********************/
void setup() {
// Setup
Serial.begin( 9600 );
// Decrease if necessary
myStepperX.setSpeed(60);
myStepperY.setSpeed(60);
myStepperZ.setSpeed(50);
// Set & move to initial default position
// TBD
// Notifications!!!
Serial.println(“Mini CNC Plotter alive and kicking!”);
Serial.print(“X range is from “);
Serial.print(Xmin);
Serial.print(” to “);
Serial.print(Xmax);
Serial.println(” mm.”);
Serial.print(“Y range is from “);
Serial.print(Ymin);
Serial.print(” to “);
Serial.print(Ymax);
Serial.println(” mm.”);
}
/**********************
* void loop() – Main loop
***********************/
void loop()
{
delay(200);
char line[ LINE_BUFFER_LENGTH ];
char c;
int lineIndex;
bool lineIsComment, lineSemiColon;
lineIndex = 0;
lineSemiColon = false;
lineIsComment = false;
while (1) {
// Serial reception – Mostly from Grbl, added semicolon support
while ( Serial.available()>0 ) {
c = Serial.read();
if (( c == ‘\n’) || (c == ‘\r’) ) { // End of line reached
if ( lineIndex > 0 ) { // Line is complete. Then execute!
line[ lineIndex ] = ‘\0’; // Terminate string
if (verbose) {
Serial.print( “Received : “);
Serial.println( line );
}
processIncomingLine( line, lineIndex );
lineIndex = 0;
}
else {
// Empty or comment line. Skip block.
}
lineIsComment = false;
lineSemiColon = false;
Serial.println(“ok”);
}
else {
if ( (lineIsComment) || (lineSemiColon) ) { // Throw away all comment characters
if ( c == ‘)’ ) lineIsComment = false; // End of comment. Resume line.
}
else {
if ( c <= ‘ ‘ ) { // Throw away whitepace and control characters
}
else if ( c == ‘/’ ) { // Block delete not supported. Ignore character.
}
else if ( c == ‘(‘ ) { // Enable comments flag and ignore all characters until ‘)’ or EOL.
lineIsComment = true;
}
else if ( c == ‘;’ ) {
lineSemiColon = true;
}
else if ( lineIndex >= LINE_BUFFER_LENGTH-1 ) {
Serial.println( “ERROR – lineBuffer overflow” );
lineIsComment = false;
lineSemiColon = false;
}
else if ( c >= ‘a’ && c <= ‘z’ ) { // Upcase lowercase
line[ lineIndex++ ] = c-‘a’+’A’;
}
else {
line[ lineIndex++ ] = c;
}
}
}
}
}
}
void processIncomingLine( char* line, int charNB ) {
int currentIndex = 0;
char buffer[ 64 ]; // Hope that 64 is enough for 1 parameter
struct point newPos;
newPos.x = 0.0;
newPos.y = 0.0;
// Needs to interpret
// G1 for moving
// G4 P300 (wait 150ms)
// G1 X60 Y30
// G1 X30 Y50
// M300 S30 (pen down)
// M300 S50 (pen up)
// Discard anything with a (
// Discard any other command!
while( currentIndex < charNB ) {
switch ( line[ currentIndex++ ] ) { // Select command, if any
case ‘U’:
penUp();
break;
case ‘D’:
penDown();
break;
case ‘G’:
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty – Only works with 2 digit commands
// buffer[1] = line[ currentIndex++ ];
// buffer[2] = ‘\0’;
buffer[1] = ‘\0’;
switch ( atoi( buffer ) ){ // Select G command
case 0: // G00 & G01 – Movement or fast movement. Same here
case 1:
// /!\ Dirty – Suppose that X is before Y
char* indexX = strchr( line+currentIndex, ‘X’ ); // Get X/Y position in the string (if any)
char* indexY = strchr( line+currentIndex, ‘Y’ );
if ( indexY <= 0 ) {
newPos.x = atof( indexX + 1);
newPos.y = actuatorPos.y;
}
else if ( indexX <= 0 ) {
newPos.y = atof( indexY + 1);
newPos.x = actuatorPos.x;
}
else {
newPos.y = atof( indexY + 1);
indexY = ‘\0’;
newPos.x = atof( indexX + 1);
}
drawLine(newPos.x, newPos.y );
// Serial.println(“ok”);
actuatorPos.x = newPos.x;
actuatorPos.y = newPos.y;
break;
}
break;
case ‘M’:
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty – Only works with 3 digit commands
buffer[1] = line[ currentIndex++ ];
buffer[2] = line[ currentIndex++ ];
buffer[3] = ‘\0’;
switch ( atoi( buffer ) ){
case 300:
{
char* indexS = strchr( line+currentIndex, ‘S’ );
float Spos = atof( indexS + 1);
// Serial.println(“ok”);
if (Spos == 30) {
penDown();
}
if (Spos == 50) {
penUp();
}
break;
}
case 114: // M114 – Repport position
Serial.print( “Absolute position : X = ” );
Serial.print( actuatorPos.x );
Serial.print( ” – Y = ” );
Serial.println( actuatorPos.y );
break;
default:
Serial.print( “Command not recognized : M”);
Serial.println( buffer );
}
}
}
}
/*********************************
* Draw a line from (x0;y0) to (x1;y1).
* Bresenham algo from https://www.marginallyclever.com/blog/2013/08/how-to-build-an-2-axis-arduino-cnc-gcode-interpreter/
* int (x1;y1) : Starting coordinates
* int (x2;y2) : Ending coordinates
**********************************/
void drawLine(float x1, float y1) {
if (verbose)
{
Serial.print(“fx1, fy1: “);
Serial.print(x1);
Serial.print(“,”);
Serial.print(y1);
Serial.println(“”);
}
// Bring instructions within limits
if (x1 >= Xmax) {
x1 = Xmax;
}
if (x1 <= Xmin) {
x1 = Xmin;
}
if (y1 >= Ymax) {
y1 = Ymax;
}
if (y1 <= Ymin) {
y1 = Ymin;
}
if (verbose)
{
Serial.print(“Xpos, Ypos: “);
Serial.print(Xpos);
Serial.print(“,”);
Serial.print(Ypos);
Serial.println(“”);
}
if (verbose)
{
Serial.print(“x1, y1: “);
Serial.print(x1);
Serial.print(“,”);
Serial.print(y1);
Serial.println(“”);
}
// Convert coordinates to steps
x1 = (int)(x1*StepsPerMillimeterX);
y1 = (int)(y1*StepsPerMillimeterY);
float x0 = Xpos;
float y0 = Ypos;
// Let’s find out the change for the coordinates
long dx = abs(x1-x0);
long dy = abs(y1-y0);
int sx = x0<x1 ? StepInc : -StepInc;
int sy = y0<y1 ? StepInc : -StepInc;
long i;
long over = 0;
if (dx > dy) {
for (i=0; i<dx; ++i) {
myStepperX.step(sx);
over+=dy;
if (over>=dx) {
over-=dx;
myStepperY.step(sy);
}
delay(StepDelay);
}
}
else {
for (i=0; i<dy; ++i) {
myStepperY.step(sy);
over+=dx;
if (over>=dy) {
over-=dy;
myStepperX.step(sx);
}
delay(StepDelay);
}
}
if (verbose)
{
Serial.print(“dx, dy:”);
Serial.print(dx);
Serial.print(“,”);
Serial.print(dy);
Serial.println(“”);
}
if (verbose)
{
Serial.print(“Going to (“);
Serial.print(x0);
Serial.print(“,”);
Serial.print(y0);
Serial.println(“)”);
}
// Delay before any next lines are submitted
delay(LineDelay);
// Update the positions
Xpos = x1;
Ypos = y1;
}
// Raises pen
void penUp() {
myStepperZ.step(stepsPerRevolution);
Zpos=Zmax;
if (verbose) {
Serial.println(“Pen up!”);
}
}
// Lowers pen
void penDown() {
myStepperZ.step(-stepsPerRevolution);
Zpos=Zmin;
if (verbose) {
Serial.println(“Pen down”)
}
and also I have searched a good making video for cncplotter: https://youtu.be/fVMQNToplHc

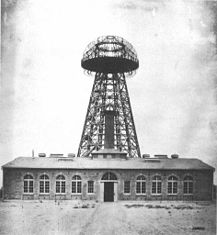
 Tesla went on to develop a wireless power distribution system that he hoped would be capable of transmit power long distance directly into homes and factories. Early on he seemed to borrow from the ideas of Mahlon Loomis,[109][110] proposing a system composed of balloons to suspend transmitting and receiving electrodes in the air above 30,000 feet (9,100 m) in altitude, where he thought the pressure would allow him to send high voltages (millions of volts) long distances. To further study the conductive nature of low pressure air he set up a test facility at high altitude in Colorado Springs during 1899.[111][112][113] Experiments he conducted there with a large coil operating in the megavolts range, as well as observations he made of the electronic noise of lightning strikes, led him to incorrectly conclude[114][115] that he could use the entire globe of the Earth to conduct electrical energy. The theory included driving alternating current pulses into the Earth at its resonant frequency from a grounded Tesla coil working against an elevated capacitance to make the potential of the Earth oscillate. Tesla thought this would allowing alternating current to be received with a similar capacitive antenna tuned to resonance it at any point on Earth with very little power loss.[116][117][118] His observations also led him to believe a high voltage used in a coil at an elevation of a few hundred feet would “break the air stratum down”, eliminating the need for miles of cable hanging on balloons to create his atmospheric return circuit.[119][120] Tesla would go on the next year to propose a “World Wireless System” that was to broadcast both information and power worldwide[121][122] and attempted in 1901 to construct a large high-voltage wireless power station, now called the Wardenclyffe Tower, at Shoreham, New York. By 1904 investment dried up and the facility was never completed.
Tesla went on to develop a wireless power distribution system that he hoped would be capable of transmit power long distance directly into homes and factories. Early on he seemed to borrow from the ideas of Mahlon Loomis,[109][110] proposing a system composed of balloons to suspend transmitting and receiving electrodes in the air above 30,000 feet (9,100 m) in altitude, where he thought the pressure would allow him to send high voltages (millions of volts) long distances. To further study the conductive nature of low pressure air he set up a test facility at high altitude in Colorado Springs during 1899.[111][112][113] Experiments he conducted there with a large coil operating in the megavolts range, as well as observations he made of the electronic noise of lightning strikes, led him to incorrectly conclude[114][115] that he could use the entire globe of the Earth to conduct electrical energy. The theory included driving alternating current pulses into the Earth at its resonant frequency from a grounded Tesla coil working against an elevated capacitance to make the potential of the Earth oscillate. Tesla thought this would allowing alternating current to be received with a similar capacitive antenna tuned to resonance it at any point on Earth with very little power loss.[116][117][118] His observations also led him to believe a high voltage used in a coil at an elevation of a few hundred feet would “break the air stratum down”, eliminating the need for miles of cable hanging on balloons to create his atmospheric return circuit.[119][120] Tesla would go on the next year to propose a “World Wireless System” that was to broadcast both information and power worldwide[121][122] and attempted in 1901 to construct a large high-voltage wireless power station, now called the Wardenclyffe Tower, at Shoreham, New York. By 1904 investment dried up and the facility was never completed.




 First step to start building this cnc machine is to disassemble two dvd/cd drives and take off them the stepper motors. Use the screwdriver to open them and take off them the rails. Next step is to choose our base for this CNC machine. I used one surface from remaining dvd ‘garbage’ stuff.Finally we will need to find something to attach the one of the stepper-rails vertically to our construction. (you will understand what I mean in our next step) Watch the above image.
First step to start building this cnc machine is to disassemble two dvd/cd drives and take off them the stepper motors. Use the screwdriver to open them and take off them the rails. Next step is to choose our base for this CNC machine. I used one surface from remaining dvd ‘garbage’ stuff.Finally we will need to find something to attach the one of the stepper-rails vertically to our construction. (you will understand what I mean in our next step) Watch the above image.